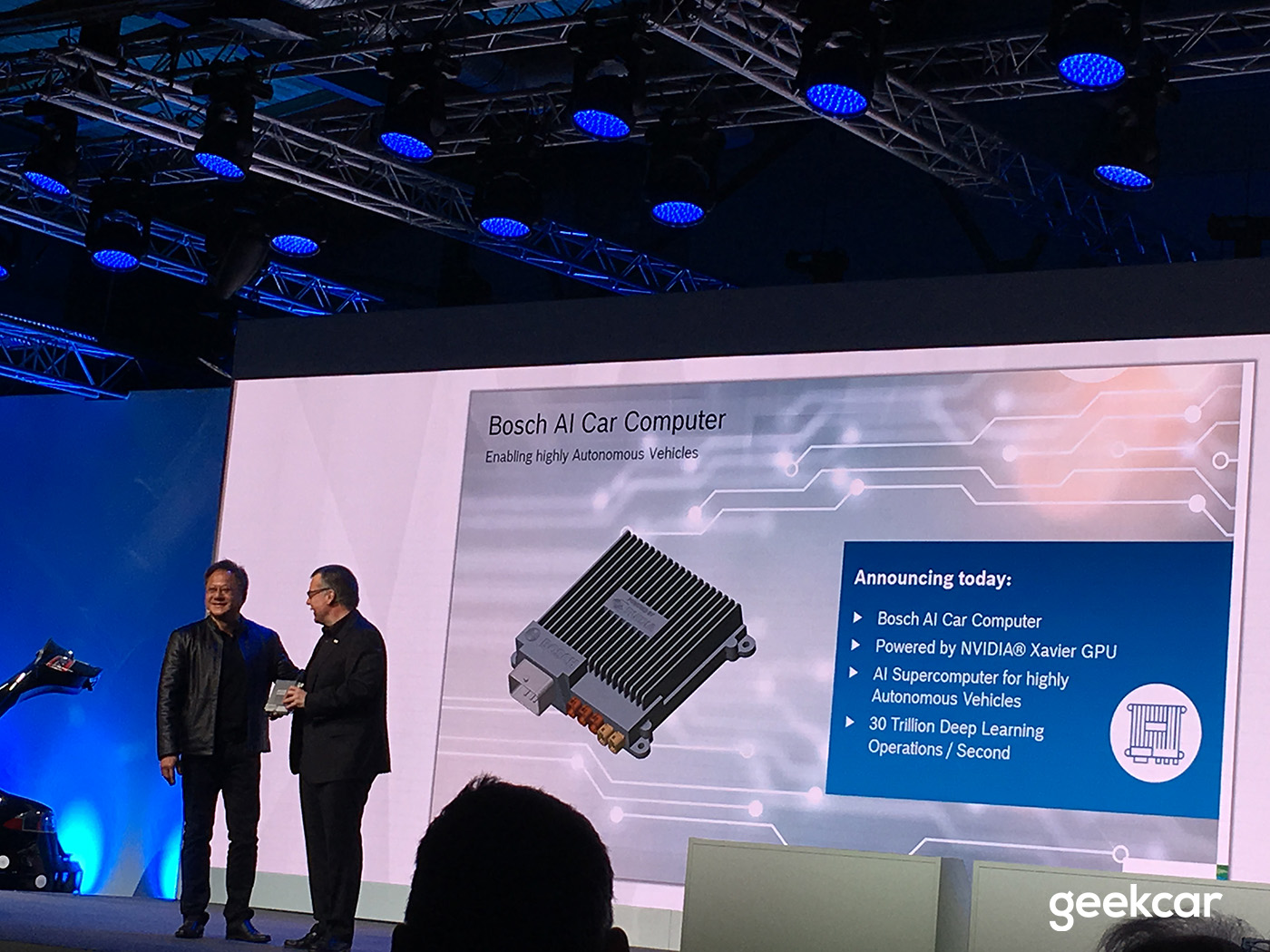
在 CES 2017 报道英伟达(NVIDIA)的文章 《CES 2017 | 详解英伟达 CEO 黄仁勋演讲:「AI 教父」的自动驾驶布局》 中,我们已经提到了 NVIDIA 发布的最新 Xavier 平台,以及与博世的合作。其实在 CES 上,老黄卖了个关子:在 3 月份德国柏林举办的 Bosch Connected World 上,他将登台发布进一步的合作成果。事实证明,老黄没有食言,在 BCW 上,博世联合英伟达发布了基于 Xavier 平台的车载人工智能电脑。
关于 Xavier 平台的运算能力,在 CES 的文章中已经有所阐述,在这里就不再具体展开。在 BCW 的发布会之后,GeekCar 有幸与老黄面对面聊了聊,本文将重点结合老黄的发布会与专访,解析他眼中的自动驾驶。
老黄在 BCW 上都讲了什么?
除了发布车载人工智能电脑,老黄在演讲中还介绍了英伟达在自动驾驶领域的 3 个布局:
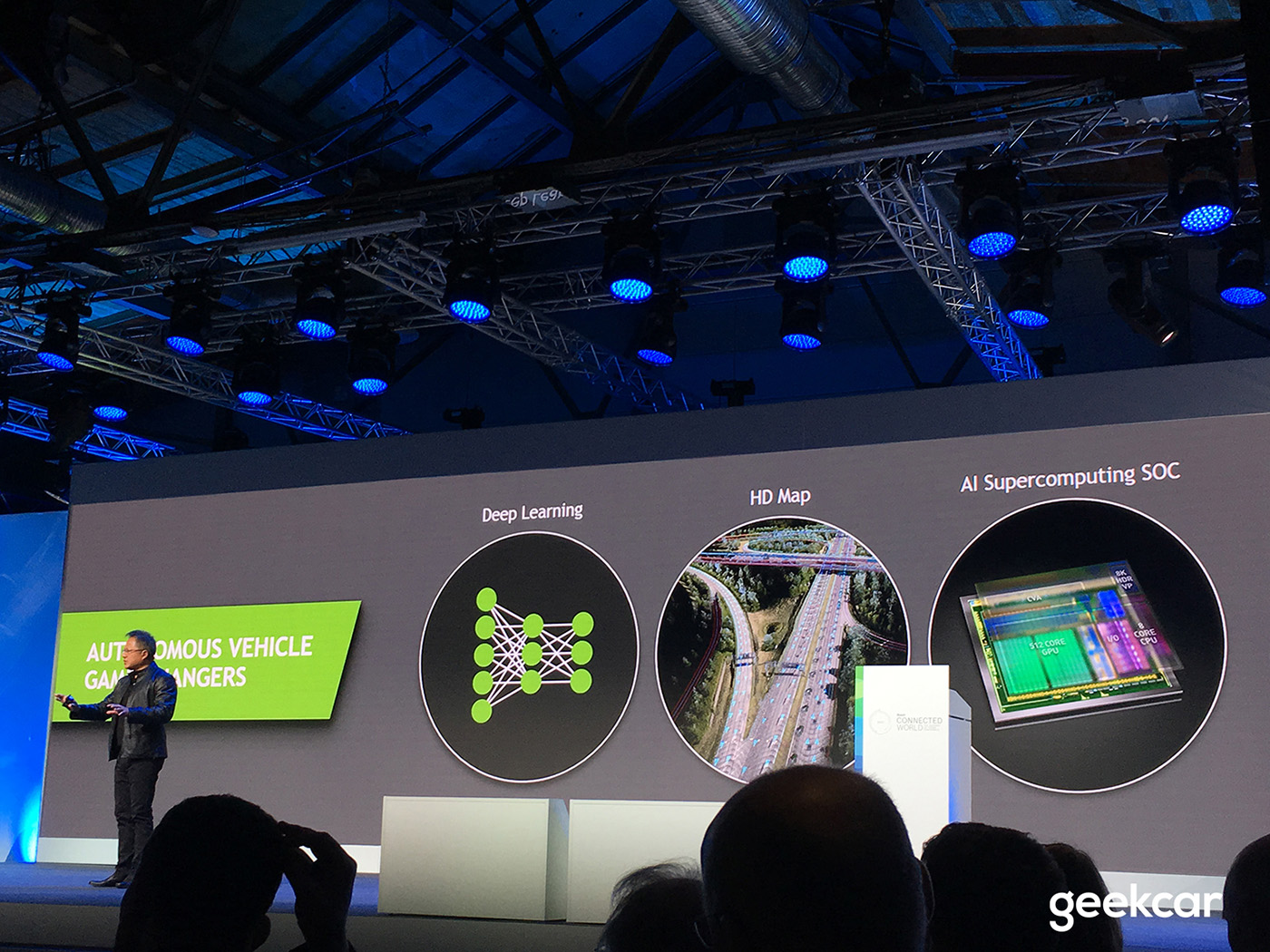
1. Deep Learning:GPU 在深度学习领域的应用成就了今天的英伟达。在老黄看来,深度学习驱动下的人工智能,也将成为自动驾驶决策的主要算法结构。
2. HD Map:在高精度地图领域,深度学习也将起到重要的作用。它能够帮助机器更高效的通过传感器收集地图数据 ,例如识别道路特征、提取建筑轮廓、识别道路图形标牌等。
3. AI Supercomputing SOC:这个是英伟达本就十分擅长的硬件芯片。博世将 NVIDIA 人工智能平台纳入到自己的零部件供应商中已经是对其硬件实力的最好证明,这也意味着英伟达的人工智能芯片将开始正式向量产平台进军。 此外,这次老黄还发布了将与卡车制造商 PACCAR 合作,基于 Drive PX 平台发展卡车领域的高级别自动驾驶。
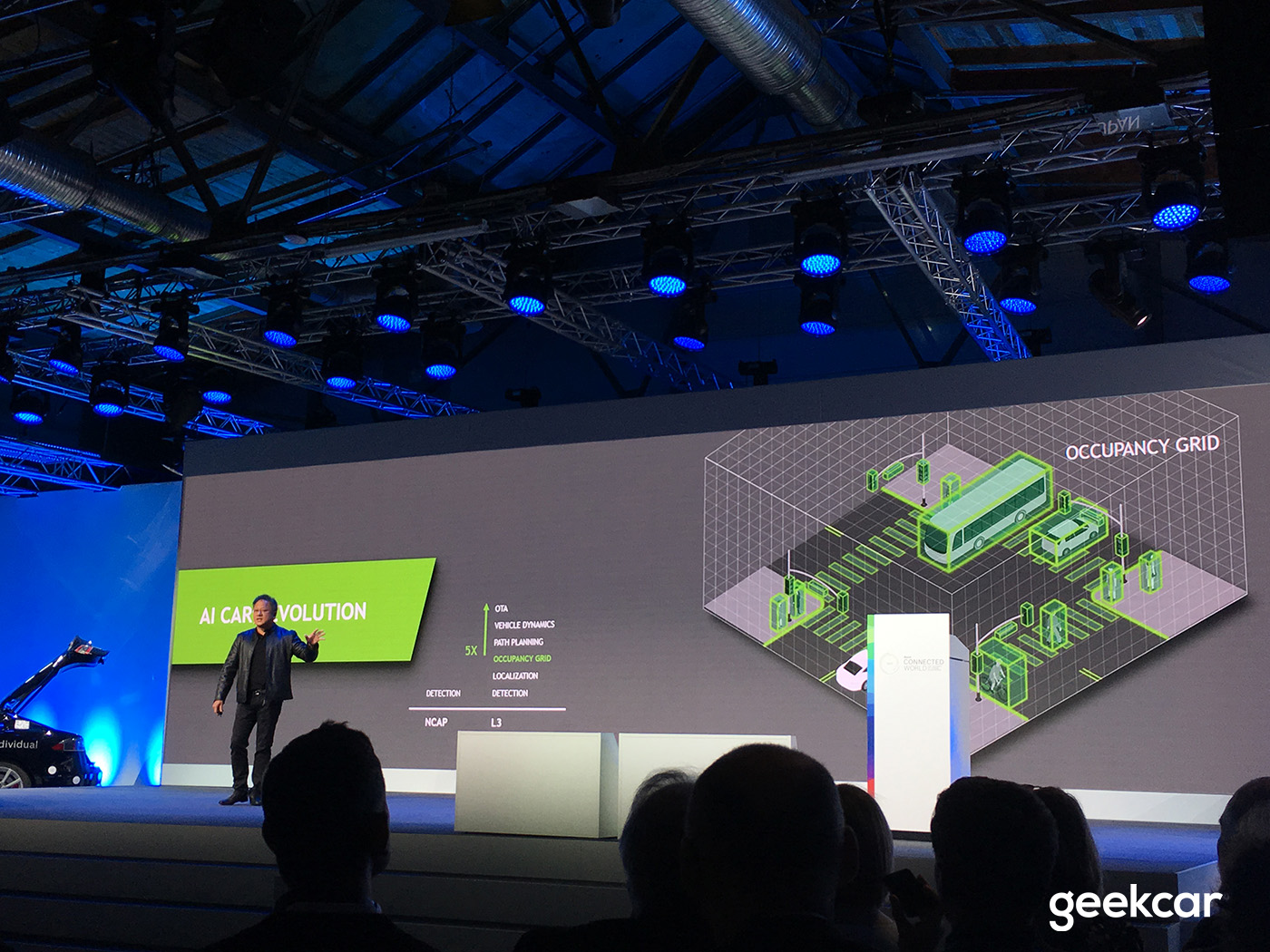
在此之上,老黄又进一步聊了实现 L3 级别自动驾驶所需要的几个环节:Detection(感知)、Localization(定位)、Occupancy Grid(占用空间)、Path Planing(路径规划)、Vehicle Dynamic(车辆运动)、OTA(在线升级)。
可以看到,除去 OTA 之外,老黄的理解与我们之前一再提到的感知、地图、决策、控制有一些类似。但是,这两者之间最大的不同点是在于对「决策」的理解。做图像处理发家的老黄,将驾驶决策巧妙的分成了两个偏向图形分析的环节:
Occupancy Grid(占用空间): 这个环节指的是,机器对于周围环境中各元素所处位置与所占空间做出的判断。这个判断既包括当前环境,也包括未来环境。而元素可以是车辆、行人、建筑物等等。
Path Planing(路径规划): 在判断了周围元素之后,机器将根据这个空间环境,规划出可驾驶的路线。
这样的划分,无疑能够更好的体现 GPU 在图像处理方面的优势。在老黄看来,目前市面上还没有任何一个量产的计算平台能够同时整合上述五个环节,而这正是 NVIDIA 希望在汽车领域攻克的难关。
最关键的部分来了:综合上面的分析,老黄提出, Deep Learning 在高精度地图以及图像识别方面的应用不仅能够优化自动驾驶的决策,更能够帮助降低车辆上所需传感器的成本。
我们之前提到过,除了特斯拉之外,大部分主机厂和 Tier 1 都认为,每一辆实现 L3 级别的自动驾驶车辆需要配备激光雷达。而老黄认为,在 Deep Learning 的驱动下,现有量产级别传感器以及高精度地图技术的潜力将被进一步挖掘,从而在一定程度上打破 L3 级别自动驾驶对激光雷达的依赖。由于目前激光雷达的成本和量产时间是实现 L3 自动驾驶的主要瓶颈之一,老黄相信,我们有可能在今年年底到 2018 年间就实现 L3 级别的自动驾驶,在 2018 年底到 2019 年实现 L4。
在德国当着无数汽车行业的人给出这样的观点,老黄就这样把他的「黄氏定律」带到了汽车圈。
带着女儿来专访
演讲之后,在 BCW 场地旁边的一个酒店会议室中,我又再一次见到了老黄。专访的一开始,老黄就给了在座的媒体一个惊喜:「今天我的女儿也跟我一起来了,有我女儿看着,你们要对我好一点哦。」这样的画风也让整个专访氛围一下子变成了科技公司的轻松范儿。
在向大家介绍完了自己的女儿之并复盘了一下自己的演讲之后,老黄开始回答起了大家的问题。
在被问到 Intel 收购 Mobileye 的事情时,他首先开玩笑的说:「他们为什么要买 Mobileye 啊!?」 随后又说:「英特尔这个决定肯定是有他们自己的原因和考虑的,至于收购后的效果,时间会给出我们结果。」
当有记者问到老黄英伟达如果面临被巨头收购会如何决策时,老黄也开玩笑道:「NVIDIA 一直都在对外出售啊,你们都赶紧来买一点我的股票吧!」可以看出,对于行业内最近的兼并,老黄并没有表现的很在意。这与他平时果断、自我的行事风格十分相符。
熟悉 GeekCar 的都知道,我们关心的是技术。所以我针对老黄在发布会上的观点提出了两个问题,以下是问答的实录(M 代表 Mark,H 代表 老黄)
M:在您的演讲当中提到了希望打破汽车行业对激光雷达的依赖,但是汽车行业对冗余是有要求的,您具体会用什么样的技术或方法替代这种冗余呢?
H:首先我需要澄清的是,我并没有说激光雷达是没用的。
目前我们使用的高精度地图收集车上都配备了激光雷达,这些已实际使用的激光雷达,加上越来越先进的其它传感器,再整合 Deep Learning 的算法,这套现有的数据收集及处理体系已经非常强劲了。未来如果固态激光雷达能够以低成本量产的话,当然能够让这套体系更加强大。
如果纯粹考虑提升感知能力的话,我肯定希望我身上张着许多眼睛,许多耳朵(虽然可能会很难看)。所以我并没有否定激光雷达的作用,所有传感器都会变得越来越好,不要把激光雷达想成全部都有或全部都没有的问题。我的观点的核心是高级别自动驾驶的切入点,固态激光雷达最终会普及,但是我觉得要等到激光雷达普及到所有车辆以后才能称之为 L4 级别自动驾驶的这种想法是错的,我们没有必要等那么久。
M:当我们提起 Deep Learing 时,人们都会想起 AlphaGo,那么 Deep Learning 在驾驶决策当中的应用与其在围棋当中的应用会有什么不用吗?在驾驶环境中,往往包含着多个决策者,每个决策者对其它决策者的行为又会产生不同的反馈,在这样持续变化且很难预知的环境中,Deep Learning 应该如何制定驾驶决策?
H:确实,驾驶和下围棋有着非常大的不同。当你开车时,你必须要先做出假设。这个假设就是:当你上路以后,大部分路上的其它车辆或行人是不会去伤害你的,你会假设路上的其他人都会遵守交通规则,例如大家会保持各自的车道,大家不会随意并线、不会违章转向等等。在这个假设的前提下,驾驶决策的问题就相对好解决了。如果你做出了相反的假设,认为大家在路上都是在互相博弈(原话为 Gaming),并会与周围的其他人产生连锁效应,那么这个场景可就不是 AlphaGo 的那种两方对决了,而是可能多如 20 个决策者相互博弈,这将是一个非常有意思的场景,但是我们目前还没有解决。如果我自己遇到了这样的场景,我宁可不开车,选择去走路……
从上面这两个问题可以看到,老黄对于高级别自动驾驶落地时间的大胆预测建立在两个基础之上:
1. 激光雷达的完全普及不是实现 L4 自动驾驶的必要条件。
2. 车辆所使用的驾驶决策将按照统一的交通规则制定。
这个观点和特斯拉有一点相似,这也可能是他们两家公司最后能在一起合作的原因(老黄自己也是特斯拉的粉丝)。不过,这样的理解相较于传统汽车行业来说确实有一些激进。这就意味着,此次 NVIDIA 与博世的合作将不单是双方的优势互补,更是两种不同理解的再次碰撞。与传统 Tier 1 供应商的合作,既为 NVIDIA 敞开了汽车行业的大门,但同时也将为他们带来更多的挑战。在谈笑风生之外,也真心希望老黄能再次把他的「黄氏定律」在汽车圈实现。
最后得说一句:老黄来中国时,肯定不开车。
原创声明: 本文为 GeekCar 原创作品,欢迎转载。转载时请在文章开头注明作者和「来源自 GeekCar」,并附上原文链接,不得修改原文内容,谢谢合作!
欢迎关注 GeekCar 微信公众号: GeekCar 极客汽车 (微信号:GeekCar)&极市 (微信号:geeket)。



One response to “专访英伟达 CEO 黄仁勋:「教主」眼中的自动驾驶,到底是什么样?”