
-Autopilot 出事故死人了!!!
-别慌,想办法。
-要增加传感器吗?
-算了不划算!
-要禁用 Autopilot 吗?
-开什么玩笑!!!
-那怎么办?
-先打个补丁再说!
-不明白……
-先别让它出事儿了!!!明白不?
以上对话,我猜大概是 Elon Musk 和特斯拉工程师之间的日常。
于是,在 9 月 11 号这天,Autopilot 升级了,特斯拉官网出现了这么一篇文章:
翻译成中文:《Autopilot 自动辅助驾驶再升级:通过雷达看世界》
WTF,你们不是一直在走「用一颗摄像头撬动自动驾驶」这个路线么?怎么变成「通过雷达看世界」了?
别急,咱们慢慢解释这件事。
很多人都知道,在特斯拉的 Autopilot 系统里,摄像头是最重要的一个传感器,由它负责观察前方路况(配合其他传感器),芯片负责进行实时运算,以此来指导系统的决策,也就是 Mobileye 的那套解决方案。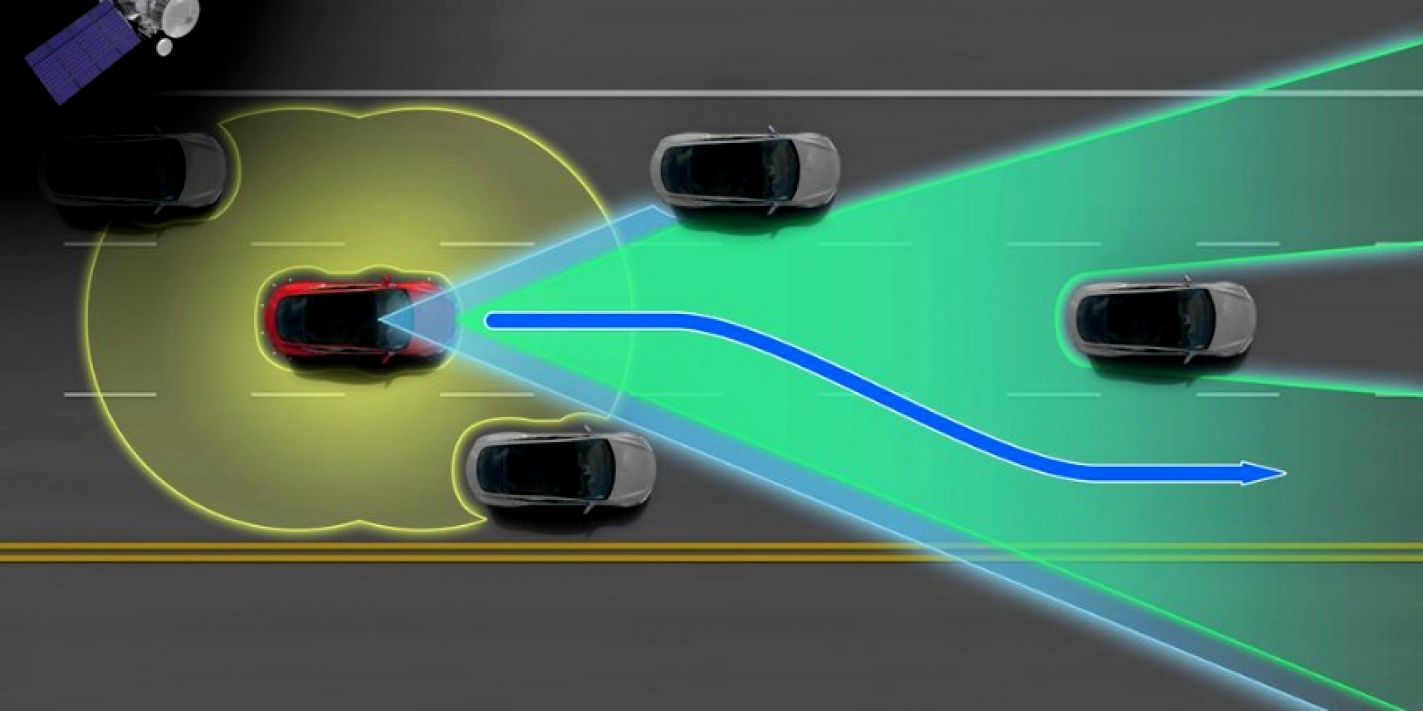
但是,在那场著名的致死事故里,摄像头玩脱了,并没有检测到那辆大卡车。这就带出一个问题:摄像头毕竟有局限性,比如容易受天气影响。简单的说,它的识别率不可能是 100%,既然这样,依赖摄像头视觉实现的 Autopilot,就不是 100%安全的。
当然,论及安全,我们都会说那句话:没有 100%的安全。
所以如果你是 Elon Musk,该怎么给 Autopilot 打补丁呢?
Elon Musk 在发布会上说了一句这样的话:
I do want to emphasize: Perfect safety is really an impossible goal. It’s really about improving the probability of safety – that’s the only thing that really ever possible.
(我想强调的是,不存在绝对的安全,唯一可能的是,尽可能的提升安全概率)
「提升安全概率」,这就是特斯拉为 Autopilot 的升级定下的宗旨。
提升安全概率,就意味着降低碰撞几率,那该怎么做呢?
Elon Musk 又说了:
It actually doesn’t matter what the object is it just knows that there’s something dense that it is going to hit – and it should not hit that.
It doesn’t need to know what that thing is – while a vision system really needs to know what the thing is. It is what I think will be a very dramatic improvement in the safety of the vehicle and entirely through software – no additional sensors are needed.
他的想法发生了一个非常戏剧性的改变:其实车子根本不需要知道将遇到的障碍物是什么,只要及时检测到就好了!然后,就可以让车子及时采取制动措施。
要干这事儿,也不需要增加传感器。虽然摄像头干不了,但是有个东西能干:
毫米波雷达!!通过进行软件层面的更改,提升它在整套 Autopilot 系统里的作用。
毫米波雷达,英文称作 Radar。它是干什么用的呢?
可能有些同学的车里带 ACC 自适应巡航功能,这个 Radar,就是 ACC 工作的基础传感器。它位于车子前部,中间靠下的位置。(也有不在正中间的,这不是重点)它用来探测车道前方的障碍物,据此来让车辆执行加减速动作。特斯拉的车子里也有这个毫米波雷达(2014 年 10 月以后出厂的车子),它的作用很大程度上也是用来实现自适应巡航功能。
这个雷达的优点:首先,在雨雪雾等天气下,它可以正常工作,这一点是摄像头的先天不足。其次,它发出的信号遇到金属就会被反射,但是又可以「过滤」掉木头、塑料这些东西,它还可以识别人,只不过会被识别为「部分透明」的。
正好符合特斯拉的需求。
在特斯拉上,它和摄像头、12 个超声波雷达一起构成了 Autopilot 运转所需的传感器,区别在于,它是配角,摄像头是主角。但是现在,毫米波雷达变成了主角。
用毫米波雷达做主控传感器,就可以比摄像头更准确的在行驶中探测到障碍物,尤其是车辆。
但是,任何传感器都会有缺陷,毫米波雷达的问题在于,虽然遇到金属能反射信号,但是很容易「过度反应」、「草木皆兵」。比如像 Elon Musk 所说,路上的一个苏打水罐子如果摆放角度不凑巧,就很容易被识别为大型障碍物。
其实,在那辆出事的 Model S 上,毫米波雷达也表现出了自己的弱点:那辆大卡车底盘太高,而 Model S 上的毫米波雷达安装位置又有点低,很有可能雷达波直接从卡车下部穿了过去,却并没有检测到这辆车。这就是问题所在:它的水平角度探测能力不错,但是纵向角度探测能力较弱。
如何避免由于误报而导致的车辆刹车?特斯拉想了三个办法:
1、「解锁」毫米波雷达的潜力,让它可以探测到比之前多六倍的周边物体,并且获得更多细节。
2、升级 3D 实时影像侦测,提高探测精确度,精准分辨移动、静止、反光的虚像。
3、分享每一辆特斯拉的行驶数据,实现危险路段预警。![]()
Elon Musk 说,升级之后的 Autopilot,会比原来安全 3 倍,并且会让特斯拉成为目前路上最安全的车。
当然,这种话你听听就好,关键是,当你开着这么一辆特斯拉时,你必须还是得集中精神,不能把自己完全交给电脑。
那么,怎么评价这次升级呢?从表面上看,这是一个「打补丁」的权宜之计。但是往更深了想,Elon Musk 做出这种决定,意味着他开始重视雷达在自动驾驶系统里的地位,而不再是盲目崇拜摄像头。当然,和 Mobileye 合作破裂,也是原因之一。
之前有消息说特斯拉要升级到双目摄像头,甚至是三眼摄像头,我们还猜测说未来特斯拉会搭载固态激光雷达,这次升级里没看到,但是仍然很有可能在 Model 3 上面装备。毕竟,这次升级是用最小的成本提升了安全,但是在特斯拉的自动驾驶之路上,这终究不是终极解决方案。
当然,这次升级也说明,在自动驾驶的实现路径上,传感器融合才是正经事儿,单靠某一个传感器,基本上没办法实现自动驾驶。
看到这个消息,特斯拉里面的毫米波雷达要感动的哭出来了:终于熬出了头!
然后,Elon Musk 化身阿森纳温格:这次我们不买人了,因为最强之人已在阵中,我们内部挖潜……
而借着这个机会,特斯拉又可以宣传一下 OTA 更新的厉害了……
原创声明: 本文为 GeekCar 原创作品,欢迎转载。转载时请在文章开头注明作者和「来源自 GeekCar」,并附上原文链接,不得修改原文内容,谢谢合作!
欢迎关注 GeekCar 微信公众号: GeekCar 极客汽车 (微信号:GeekCar)&极市 (微信号:geeket)。



9 responses to “特斯拉 Autopilot 升级: Elon Musk 就这样变成了汽车圈的温格”