
1800 万颗,这是 2022 年国内量产的新车上搭载毫米波雷达的数量,跟前一年相比增长了 30%;跟这些毫米波雷达一起上车的还有 22.1 万颗激光雷达,以及数千万颗摄像头。
为了让智能驾驶逐步落地,过去一年里车企们为感知系统全副武装,更多的数量、更高的性能的多传感器融合尝试,然而鬼探头、团雾等极端天气下智能驾驶感知的长尾问题依然困扰着大家。传统雷达在感知上的缺陷,激光雷达居高不下的成本,都让感知系统急需新鲜力量,比如分辨率更高、性能更好、成本更可控的 4D 成像雷达。
前不久的 CES 上,作为视觉感知巨头的 Mobileye 宣布了自家 4D 雷达产品将在两年内实现量产,4D 成像雷达这个赛道里正在迈向量产的不止 Mobileye,初创公司赛恩领动也正式发布了首款自研车规级高性能成像雷达 SIR-4K,又一个新玩家入局 4D 成像雷达赛道。
- 4D 成像雷达这个赛道为何备受追捧?
- 它究竟能为智能驾驶带来怎样的改变?
- 赛恩领动作为一家年轻的初创公司机会在哪?
带着这些问题,GeekCar 采访到了赛恩领动创始人李旭阳博士, 来看看 4D 成像雷达这个新赛道,以及赛恩领动这位新赛道上的新玩家有着怎样的故事?

(赛恩领动智能科技有限公司创始人& CEO 李旭阳 博士)
「成像雷达的性能还没被真正挖掘出来」
对于熟悉雷达领域的人来说,4D 成像雷达这个概念已经有近十年的历史,不过对于国内大多数人来说,真正第一次见到 4D 成像雷达上车,可能还是在去年飞凡 R7 上。作为国内首款搭载了成像雷达的量产车,飞凡 R7 搭载了两颗 Premium 4D 成像雷达,而那时赛恩领动刚刚成立还不到一年,正处在对 4D 成像雷达智能硬件、传感器算法及软件的研发验证中。

眼看着「大厂」的成像雷达已经量产落地,像赛恩领动这样的初创公司入局是不是太晚了?
「成像雷达领域依然是蓝海。」 在李旭阳博士看来,在 2021 年进入成像雷达这个领域并不算晚,甚至可以说是正合适的时候。
「新产品的推出也需要天时地利」,「在不合适的时机将不够成熟的技术推向市场,可能起负作用。」 如今正好是属于成像雷达「天时地利」都得到满足的时机。
一方面,传统雷达趋于成熟的性能已经无法满足感知需求,激光雷达上车后依然无法填补感知冗余的短板,以及激光雷达高企不下的价格,让行业内更愿意去尝试和接受一项性能更好、成本更可控的创新技术;另一方面,当成像雷达经历了近十年的技术发展和积累,才足以更好地挖掘出性能,在高性能和低成本之间找到最佳的平衡点。
作为曾经博世德国第五代和预研第六代成像雷达产品的技术负责人、推动 L4/5 Robotaxi 多传感器系统量产化近 7 年时间的李旭阳博士这样形容当前的成像雷达行业:「上一代产品,还没有真正把成像雷达真正的性能挖掘出来。」
要把成像雷达真正的性能挖掘出来,打造一款高性能的成像雷达并非易事,从系统设计、算法开发、AI 优化到工程量产,每个环节都必不可少,而且开发周期较长。
(赛恩领动首款自研车规级高性能成像雷达 SIR-4K)
在系统设计层面,上一代成像雷达普遍采用均匀阵列的天线布局,要获得更好的性能,需要采用更复杂密集的天线布局和波形设计,如何解决天线之间耦合问题和测角精度的需求又成了新问题。对此,赛恩领动使用空间与多普勒联合变换技术,解决了传统 TDMA(Time Division Multiple Access)导致发波周期过长的问题,同时避免了 DDMA(Doppler Division Multiple Access)带来的速度模糊度和相位一致性与校准的量产难题。换句话说,让成像雷达探测的距离和准确度同时提高。
在解决了射频技术的突破后,还需要将目标反射回来的电磁波处理成点云、行程稳定可靠的目标追踪。要解决这个问题,需要将数字信息处理 DSP 技术及雷达感知算法掌握在自己手里。同时将 AI 的能力与传统的雷达算法能力相结合,让成像雷达呈现出更清晰、干净、准确的点云。

相比于传统雷达,高分辨率的成像雷达也会将量产时的微小的工程误差放大,更加依赖落地量产的经验。针对这一点,赛恩领动本地团队有着多年对于雷达目标跟踪算法在量产项目中的经验,来解决这类问题。
系统设计、算法优化、AI 技术、工程量产经验等等,正是这些环节的核心技术,让赛恩领动这个新玩家能够在一年多的时间里,有信心把成像雷达真正的性能挖掘出来。
用「第四类感知」解决痛点
2022 年 10 月,特斯拉挥刀砍掉了车上的超声波雷达。正当纯视觉派一片欢呼,觉得即将用摄像头解决一切感知需求时,又传出来了消息:特斯拉正在研发新的雷达,并将在 2023 年初亮相。这个能让马斯克「自我打脸」的新雷达,就是 4D 成像雷达。

(特斯拉要求美国联邦通信委员会将新型雷达的保密期限延长 60 天至 2023 年 2 月 7 日,行业内推测新型雷达为 4D 成像雷达)
目前的智能驾驶配置中,毫米波雷达几乎成了标配。然而对于高阶智能驾驶来说,传统毫米波雷达在探测精度和成像能力上的短板显然已经无法满足要求,激光雷达高额的价格和特殊天气下的可靠性有难以解决,让 4D 成像雷达成了能够为智能驾驶系统提供第四类感知的一匹黑马。
如果从字面上来看,从传统的 3D 毫米波雷达到 4D 成像雷达,是在原本速度、距离、方向 3 个维度数据基础上,增加了对于目标高度的分析,提供 4 个维度的数据信息。
不过从传统 3D 毫米波雷达到 4D 成像雷达的提升,远不止是「3D+1D」这么简单,而是灵敏度、分辨率、探测距离、对于静态障碍物的识别、生成点云等全方位提升。
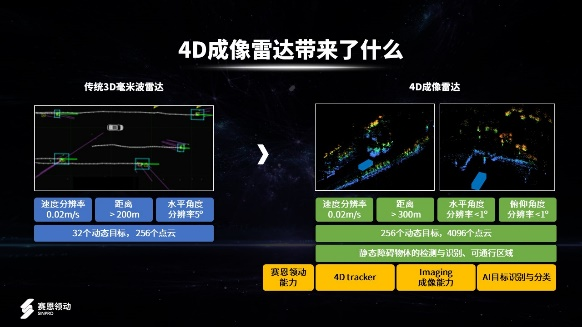
以赛恩领动发布的首款 4D 成像雷达 SIR-4K 为例,这款成像雷达工作频段使用 76-79GHz,满足 L3-L5 智能驾驶和无人驾驶对于感知的性能要求。与传统毫米波雷达相比,最远探测距离提升一倍,达到 400 米;对静态障碍物的检测也能达到 150 米以上,这是之前传统毫米波雷达无法提供的。
在探测精度上,水平方向的角度分辨率从传统毫米波雷达的 5º提升到 0.5º,通过算法加持,能够精确区分动态和静态目标;俯仰方向的角度分辨率可达到 1º。
探测距离、探测精度的提升、对于静态车辆行人探测能力的提升,可以让系统预先感知到远距离处的隐藏目标,类似行人鬼探头这样的潜在危险,就可以被提前消灭在。
在雨雪大雾等极端天气下,摄像头和激光雷达的探测能力打折扣时,电磁波感知的原理依然能让成像雷达保持一定的稳定性,解决了极端天气下看不远的痛点。
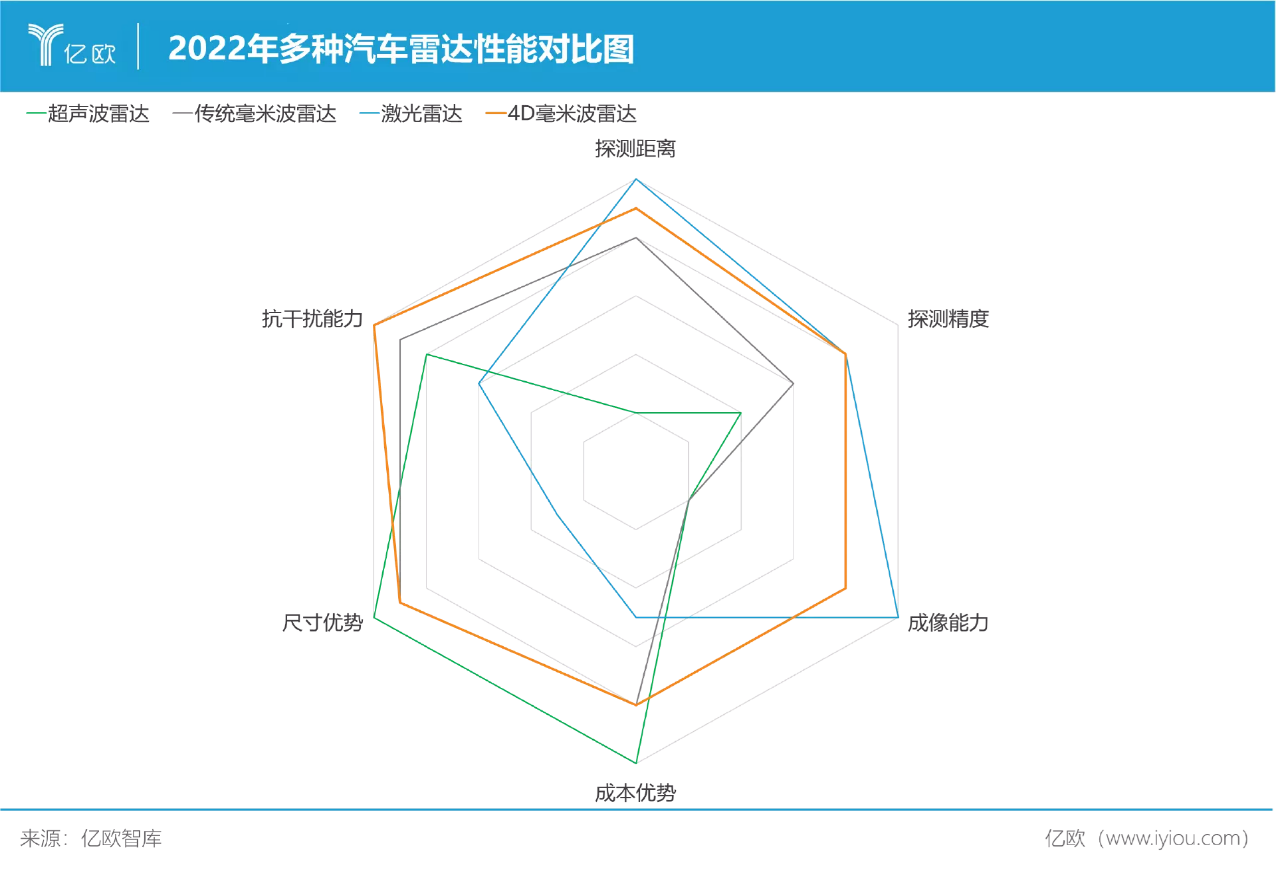
(图片来源:亿欧)
除了探测距离远、探测精度高、可对静态障碍物进行分类、应对恶劣天气外,SIR-4K 通过对 192 个通道的有效利用,在不大幅增加硬件算力的基础上,可以实现对于 256 个动态目标的输出,4096 个点云的输出。这个点云数量是传统 3D 毫米波雷达的 16 倍,是目前部分已经量产的成像雷达的 4 倍,相当于 64 线激光雷达的点云质量,而成本只有激光雷达的近五分之一。
通过天线布局、算法、AI 目标识别与分类等优化,为感知算法提供干净且有效的点云输出,对于目标形态有更好的 3D 还原,同时增加对于目标的多普勒速度感知,实现 4D 级别的扩展目标追踪。
「会做传统雷达的,不一定能 做成像雷达。」 李旭阳博士这样形容 4D 成像雷达。
如果说传统毫米波雷达几乎是纯硬件,那 4D 成像雷达则是软硬件兼顾,一方面提升探测距离和精确度这样的硬指标;另一方面利用数据和 AI 不断优化迭代算法,让目标识别和分类的准确率更高。软硬兼施之下,智能驾驶落地中的痛点才能得到缓解。
成像雷达的春天:把感知性能提上去,把智驾价格打下来
现阶段,在保证摄像头高像素的背景下,市场上智能驾驶感知方案主要有两种选择:一种是基于摄像头的纯视觉路线,另一种是多传感器融合路线。
面对这两条路线,4D 成像雷达与传统雷达相比提升了不止一倍的探测性能和点云质量,与激光雷达相比五分之一的成本,以及恰好与激光雷达和摄像头光学感知恰好互补的电磁波感知原理,让 4D 成像雷达成了两种感知路线中的万能搭档,也是多感知融合路线中不可或缺的存在。

面对 L2 级 ADAS 系统感知需求时,4D 成像雷达可以代替传统 3D 毫米波雷达,将感知系统的性能提升上去。
面对 L3、L4 级高阶智能驾驶的感知需求时,4D 成像雷达一方面可以与纯视觉方案中的摄像头融合,帮助智能驾驶系统更准确地进行物体分类,从而提供足够的系统冗余;另一方面可以与激光雷达融合,通过 4D 成像雷达提供的高性能探测精度和点云质量,减少对多个激光雷达的依赖,将感知系统的硬件成本降下来。
「2024 年是成像雷达规模化落地的元年。」
尽管去年已经有车型搭载了成像雷达,不过在李旭阳博士看来,2024 年才是真正意义上的元年。
相比于如今个别车型上搭载的成像雷达,到 2024 年我们能在大规模的新车型中看到 4D 成像雷达,将感知系统的性能提升上去,将智能驾驶的成本降下来。也许只有性能与成本得到了最佳的平衡,高阶智能驾驶才能真正的在乘用车上的落地。

最后
「为什么会选择创业做 4D 成像雷达?」 这是我们这次采访中的最后一个问题。
这些经历既让他敏锐地捕捉到 4D 成像雷达这个行业未来的趋势,也让他真切地感受到过去多年雷达领域里国内企业的势微, 「我只是想回国研发属于自主品牌的 4D 成像雷达,没有合适的平台,我会想为什么我不自己做呢?」 李旭阳博士这样说。