
当自动驾驶在量产车上从 L2 级向 L2+迈进,各家车企对软件、硬件的 pk 已经到了白热化阶段。除了依然坚持视觉路线的特斯拉外,今年发布的新车中,没搭载激光雷达都不好意思秀自己的自动驾驶能力,ARCFOX 极狐 阿尔法 S、小鹏 P5、蔚来 ET7、上汽 RS33、宝马 iX、智己 L7 都预告了激光雷达的上车。
激光雷达仿佛成了 L2+,甚至 L3 级、L4 级自动驾驶的代名词。

激光雷达是怎么从 Robotaxi 上「头上长犄角」的庞然大物,变成了量产车上的小巧的「必选项」呢?

体积更小、成本更低,激光雷达上车的法宝
激光雷达利用发射和障碍物反射回的激光来探测障碍物。在这个过程中,光波发射方式、光束操作、探测、测距以及数据处理方式 5 大核心技术不同,都会得到性能、效果不一样的激光雷达。
目前的光电系统中,扫描部件这个类似镜子的结构,将激光光束发散成更多光线,也是激光雷达中最大成本单元,直接影响到性能。我们常说的「机械式「、」半固态「、」固态「,就是按照扫描模块和激光收发模块的运动情况不同来分类的。
(图 1)
机械式激光雷达中,「镜子式「的扫描模块和激光收发模块都可以 360°旋转运动,这两个模块 360°的运动能将激光更密集的发散出去,探测性能最好。但是双向运动的机械结构也最复杂,体积庞大。
混合固态(半固态)激光雷达中,激光收发模块不动,扫描模块自己运动。这种「镜子「自己运动,当然不如机械式的探测效果好,不过结构上简化很多,体积也变小了。不过」镜子「的材质、形状、运动方式不同,半固态激光雷达也分成好多种。
纯固态激光雷达,则是激光收发模块和扫描模块都不运动,没有了内部移动,成本最高的扫描模块可以在结构上简化,整个激光雷达的体积和成本也大大降低了。
不同类型的激光雷达,优缺点也很明显。
(图 2)
从机械式、半固态到纯固态,激光雷达的体积变小,成本也降低了。
而成本,当然是车企最关心的。
早期用在 Robotaxi 上的机械式激光雷达,以 Velodyne 为例,64 线机械激光雷达在 8 万美元,32 线机械激光雷达成本在 2 万美元。第一款满足车规级的激光雷达 SCALA,第一代时的价格也一度达到 2 万美元级别。所以目前在量产车上使用 SCALA 的客户,无论是奥迪 A8,还是奔驰 S 级,都是百万级豪车的级别,对价格的宽容度很高。那些由终端消费者买单的大量私家车,对价格敏感度就高多了。
主机厂们普遍能接受的价格期望是多少呢?
- 在 L4 级自动驾驶系统中,激光雷达的采购价最终能够达到 1000 美元以下;
- 在 L2+自动驾驶系统中,激光雷达长期目标价格能够达到 500 美元以下。
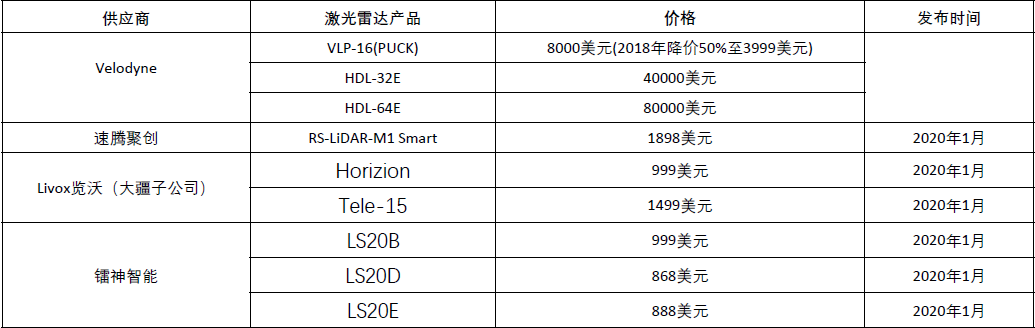
因此我们看到,进入 2020 年后,当半固态、固态激光雷达逐渐代替机械式雷达,激光雷达的成本和体积大幅度降低,直接从上万美元降低到 1000 美元时,逐渐接近车企能够接受的价格,才有了今天激光雷达批量上车的局面。
除了价格,尺寸也是激光雷达批量上车的主要原因。
早年 Robotaxi 上的机械式激光雷达,就像天灵盖上的犄角,占的体积非常大,完全不能放置在车内。如果把这样的车卖给消费者,恐怕没有几个人愿意买账。

现在「上车」的半固态激光雷达,体积已经缩小到了 1~2 个手机的大小,安置在车顶或者保险杠两侧,大疆展示的激光雷达甚至能集成在后视镜上。更小的体积,才能让激光雷达不影响量产车本身的造型设计。


当然,价格和尺寸只是万里长征第一步,性能和可靠性才是王道。
多条技术赛道并行
已经发布了搭载激光雷达的车型中,不仅激光雷达来自不同品牌,位置不同,选择的路线也有很大差别。俗称外行人看热闹,内行人看门道,激光雷达都有哪些门道了,其实从主机厂关心哪些指标就知道有哪些门道了。
目前,无论是 OEM 还是激光雷达厂家都达成共识,高速、拥堵等场景是自动驾驶最大的市场。面对高速、拥堵场景,摄像头的视觉方案+激光雷达是最容易实现自动驾驶的。尽管,很多人把使用激光雷达和不适用激光雷达看作两个技术的对立面,但现实中,选择激光雷达,是目前车企实现自动驾驶现阶段功能的最优方案。
因此车企对于激光雷达在 L2+的性能要求如下。
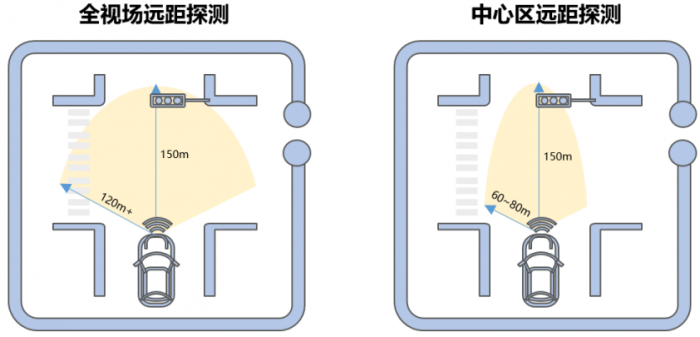
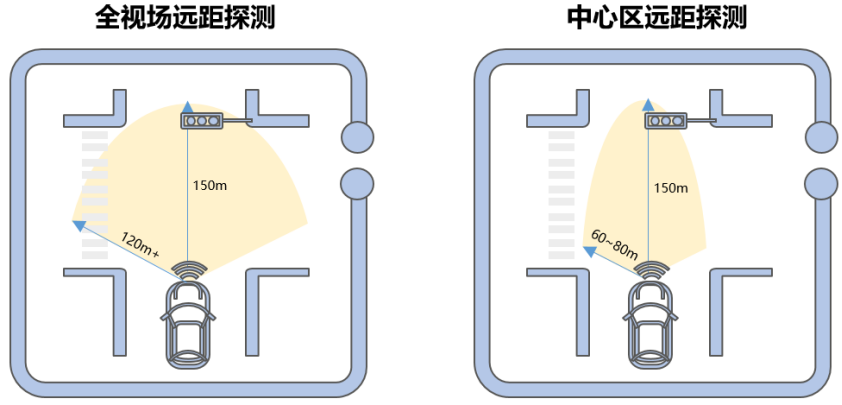
- 测距距离:探测障碍物的最远距离。比如折射率低于 10%的物体(比如纯黑色车辆),高速场景下至少有 150 米以上的探测距离。
- 视场角 FOV:探测的「视野」范围,FOV 越大,「视野」越好。激光雷达应具有 120°FOV 宽视角,满足十字路口等特殊场景的检测。
 测距的精准度:精确度越高,探测到障碍物的位置信息越准确。精确度要满足≤3cm,角分辨率越小越好,水平和垂直角分辨率≤3°。
测距的精准度:精确度越高,探测到障碍物的位置信息越准确。精确度要满足≤3cm,角分辨率越小越好,水平和垂直角分辨率≤3°。- 点云:点云和线束数量越多,感知的障碍物越精确。激光雷达应具备 100 线以上的扫描效果和百万级别点频,这样,遇到 150m 外的物体时,也能反射回足够多的激光点云用于识别。
- 车规级:具有车规级标准的工作温度,能够规模化生产。
这些要求看起来不复杂,但其实都满足这些条件的激光雷达,目前基本上寥寥无几,或多或少都有不满足的地方。这就是为什么,现在各车企在激光雷达上选择的路线不同,安装的位置也不同。
目前发布的车型中,大多数都选择了半固态激光雷达:小鹏 P5 搭载的 Livos 激光雷达属于棱镜方案,蔚来 ET7 的 Innovusion 和 R 汽车 ES33 的 Luminar 激光雷达属于转镜方案,华为的激光雷达属于转镜方案,Lucid Air 选择的速腾聚创 M1 激光雷达,都是半固态激光雷达。这其中有成本、体积的原因,也有兼顾了性能需求的考虑。
蔚来 ET7、上汽 R ES33 以激光雷达作为核心传感器,都选择了转镜式激光雷达,也就是通过平面镜绕圆心 360°旋转,将发射器发出的激光反射出更多的线束。


转镜式激光雷达最远探测距离 500 米,针对 10%低反射物的探测距离达到 250m,满足了探测距离的要求。针对十字路口这样的场景,转镜式激光雷达的 FOV 角度大,120°*30°的大角度,能探测垂直于行驶方向道路上的障碍物。因为 FOV 更大,这两款车也都选择了顶置,安置在挡风玻璃上端的一颗激光雷达,就能够探测足够宽范围的场景。
除了蔚来和上汽,BBA、本田选择法雷奥的激光雷达也是转镜方案,作为第一个通过车规级、成本可控的激光雷达,可靠的、可批量化方案,显然目前更多车企的选择。
与蔚来和 R 汽车不同,小鹏 P5 没有把激光雷达作为核心传感器,而是以摄像头和高精地图组合的视觉方案作为自动驾驶的核心,激光雷达只是一种安全冗余的手段。 因此,小鹏 P5 采用的 Livox 激光雷达,属于棱镜式。

就像小时候玩的三棱镜,一束光达到棱镜上,能折射出彩虹的光谱,棱镜式激光雷达发射器数量更多,点云密度更高,这样探测障碍物精确度高。不过两个棱镜折射出的点云没办法做到一行一列的点云形状,而是中间密四周稀疏的菊花型。想要的到密集的点云,需要对同一个位置的扫描时间更长。

因此小鹏 P5 在前保险杠两侧配备了两颗激光雷达,来保障点云覆盖密集。因此这个激光雷达 10%低反射物的探测距离只有 150 米,点云密度有效于 144 线,比其他几家的激光雷达近得多。不过作为一种硬件冗余手段,倒是足够了。
除了棱镜式和转镜式外,半固态激光雷达中技术相对最成熟、产业链也最完整的 MEMS 是很多人认为的当下主流。Lucid Air 采用的就是速腾聚创 M1 激光雷达。
MEMS 激光雷达是利用半导体器件微振镜做很小的平行运动动和扭转,部件运动小,结构简单。不过传统 MEMS 技术的有效探测距离近,只有 50m,FOV 角度只能达到 30°,所以,目前国内的新能源汽车目前还没有采用 MEMS 技术激光雷达的。
当然也有例外,速腾聚创 M1 采用了新技术把 FOV 扩大到 120°,探测距离 200m,10%低反射物的探测距离 150m,这样就能满足车企的需求了。
除了以上几家搭载了不同技术路线的半固态激光雷达,也有直接选择啃硬骨头的。长城摩卡就直接选择了 Ibeo 公司提供的 Flash 固态激光雷达,由于没有运动部件,体积更小,成本更低、可靠性也更高。不过,目前的纯固态激光雷达还处在探索阶段,探测距离只有 130 米。不过,长城摩卡 2022 年才交付,到时候固态激光雷达的性能会进化到什么地步,是骡子是马,还要等上市之后见分晓。
最后
自动驾驶从零开始走到今天,当停车场、高速路这样的强需求场景下,越来越多的辅助驾驶功能逐渐落地时,自动驾驶也面临更复杂场景下的困境。激光雷达这种新的感知手段,被无数车企和科技公司当成了困境中的一颗「救命稻草」。
2021 年作为激光雷达量产上车的「元年」,还只是一个开端。故事的开端通常都是一团乱麻,激光雷达的开端也不例外。每家车企和激光雷达公司都尝试了不同的路线:有的选择了不同方案的半固态激光雷达;有的直接跨过中间态,选择了固态激光雷达;当然也有更大胆的,直接抛弃了激光雷达。
我们能清楚的看到每种路线的优点,也能看到它的很多不足。这是一项新技术上车时,必须经历的「阵痛阶段「。只有经历了不同技术路线的探索,激光雷达的路线才能越来越清晰,做到真正的」量产上车「。
在这之前,激光雷达还有一条曲折的长路要走。