
自动驾驶的实现路径有几条?业内分为两条:第一条,逐渐向上迭代,最终实现 L4 自动驾驶;第二条,一步到位,跳过 L2,直接搞 L4。
不过,迭代路线内现在又多了一种新「玩法」:「L4」当 L2 用,然后逐渐向上迭代。
Mobileye 是一个典型代表。
今年 9 月,Mobileye 与吉利达成合作,将把其全栈式环绕视觉解决 Mobileye SuperVision™方案用于吉利子品牌领克的全新纯电豪华轿跑概念车 ZERO concept 上。
按 Mobileye 自己说,Mobileye SuperVision™是 Mobileye 为 L4 级自动驾驶汽车(AV)开发的真冗余传感套件中的纯摄像头技术。也就是说,这是一套从「L4」降维到 L2 使用的自动驾驶技术。
可能有的同学听着有点懵逼,不急,先来了解一下 Mobileye 怎么去做 L4 的。
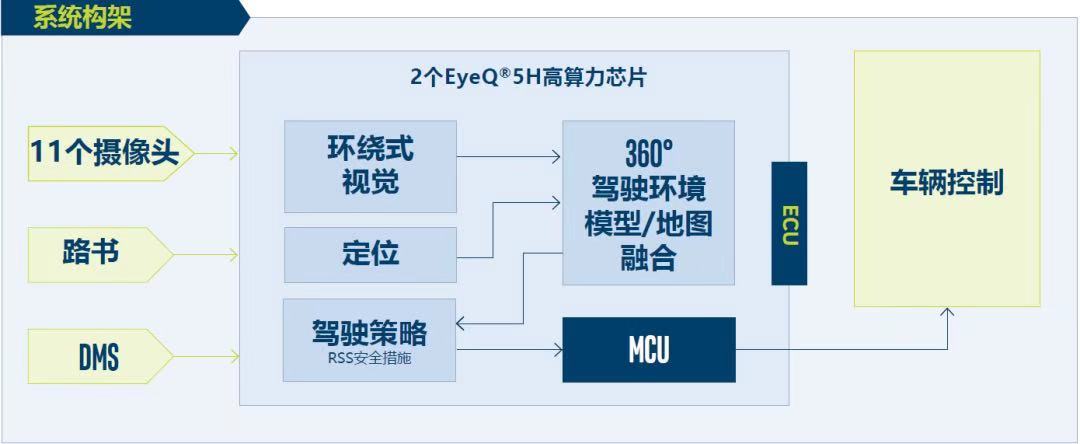
一般来说,我们常见的实现自动驾驶方式是通过多传感器来实现冗余,比如我们现在看到的 Waymo,搭载了一堆摄像头、激光雷达等传感器,共同做感知识别,通过数据融合的方式提升感知的准确性。但是 Mobileye 并没有这么做,而是直接搭载了两套独立系统实现自动驾驶,一套是摄像头系统,一套是雷达与激光雷达系统,前者就是 Mobileye SuperVision™。
今年 5 月,Mobileye 公布了一段全程纪实的视频,记录了其自动驾驶汽车在耶路撒冷街道上连续行驶 160 英里(约 257 公里)期间的情景。
现在,宣称可实现 L4 的摄像头系统被用于实现可解放双手的 ADAS 功能,可以实现这么多东西:
- 可解放双手 的高速公路驾驶,包括变道、不同高速公路之间导航、上/下匝道以及城市道路的驾驶;
- 自动泊车;
- 防御性自动转向与刹车—基于 RSS(责任敏感安全模型)的微操控,可预防性地规避道路上危险的紧急状况,提供平稳舒适的驾乘体验;
- 端到端系统,包括完整 Mobileye 设计,硬件架构和实施,ECU 设计,功能堆栈,决策层和终端用户功能;
- 标准 ADAS 功能,包括 AEB、ACC 以及 LKA 等。
这里面透露了两个信息点:
1、此次与吉利的合作不同于以往,此前 Mobileye 更多的是一个 Tier 2 角色,为 Tier1 和主机厂提供 EyeQ 芯片以及相关产品,这次是 Mobileye 首次以 ADAS 系统供应商 的角色出现;
2、这套系统针对的不只是当下的 L2/L2+,想 实现类 L3 甚至是 L3 的功能。
嗯,从面上来看,似乎这真的是一次降维打击。
为什么要这么宣传?
这是 Mobileye 今年在 CES 上放的一张自动驾驶落地路线图:
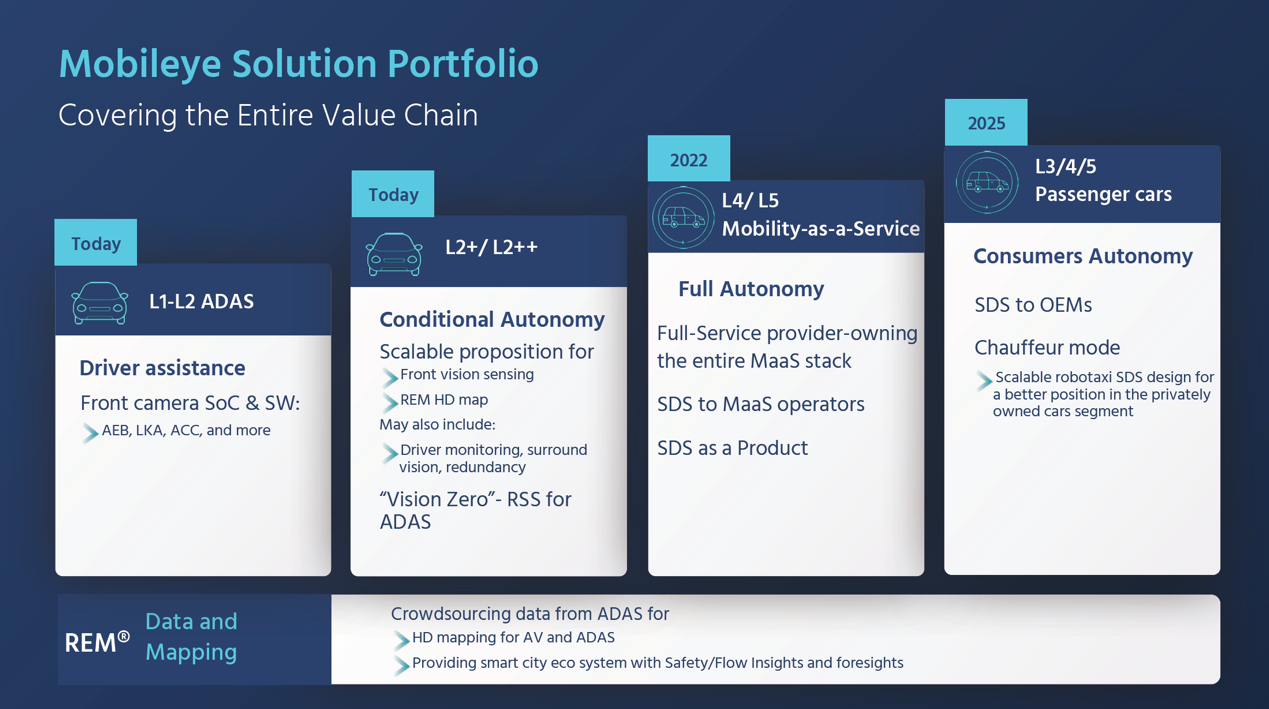
Mobileye 的思路是双线并行,一条线针对辅助驾驶(L1、L2/L2++),另外一条针对高级别自动驾驶。
那么 L3 呢?被放在了 2025 年。而更早的 2022 年,Mobileye 计划实现 L4/L5 的出行服务部署。也就是说,Mobileye 希望在实现 L4 之后,降维来实现 L3。 现在来看,Mobileye 调整了自己的战略,提前将「L4」降维。
顺着刚刚的思路往下想,提前将「L4」降维。意味着,MobileyeL4 的研发进度和落地速度可能并不理想,Robotaxi 很有可能会延期。
一方面是落地遥遥无期的 L4,一方面是商业化的应用需求,这些促使 Mobileye 做了这样的决定。
说白了, 这是技术和商业化上的一种平衡。
不过是供应商的话术罢了
话再说回来,L4 当 L2 用,听起来很厉害的样子。但是真的就像供应商说的那样,这套东西已经实现 L4 了吗?
恐怕未必。
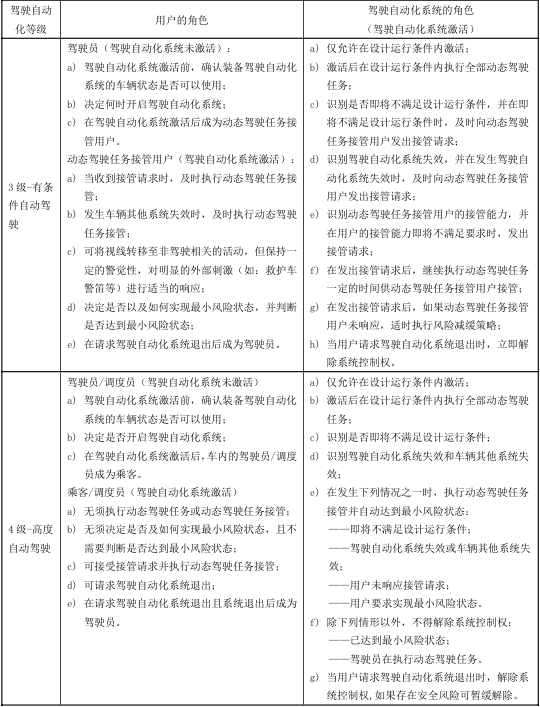
我们先来看 L4 的定义。我国的定义是这样的:驾驶自动化系统在其设计运行条件内持续地执行全部动态驾驶任务和执行动态驾驶任务接管(注: 对于 4 级驾驶自动化,系统发出接管请求时,若乘客无响应,系统具备自动达到最小风险状态的能力)。
OK,定义是有了,那么,衡量 L4 是否可用的标准呢?是几百万公里才发生一次事故?还是跑完多少公里的实际路测(兰德智库曾各给过一个数字:110 亿英里,约 177 亿公里)?
不好意思,我们还没有一个硬性标准。
不可否认,可能相比于现在的很多辅助驾驶产品,这种所谓「L4」降维的产品可能真的会强不少,但是真的能达到 L4 吗?还真不一定。
再者,如果真的当作 L2 来用,责任主体其实还是用户,那和当下主流的 L2 没有本质区别。
So,说直白点,这不过是供应商宣传自己自动驾驶产品的新话术。

除了 Mobileye,华为其实也是类似的思路。在此前的「HI」品牌发布会上,华为智能汽车解决方案 BU 总裁王军表示,华为 ADS 高阶自动驾驶系统,采用以终为始的设计架构,是以 L4 自动驾驶架构为基础,提供从 L4-L2+的全栈解决方案。
此前,在接受媒体采访时,华为智能汽车 BU 智能驾驶产品线总裁苏箐表示,ADS 是将 L4 当作 L2 来用。
但是,本质上和 Mobileye SuperVision™的这套下放逻辑类似。
一开始,华为瞄准自动驾驶赛道,就是由 L4 作为切入点。2018 年 7 月,华为与奥迪在柏林签署了战略合作谅解备忘录,共同开发智能互联汽车;同年 10 月,双方表示将会在 L4 自动驾驶方面进行联合创新,将华为 MDC(智能驾驶计算平台)集成到奥迪 Q7 原型车中。

2019 年 9 月的华为全联接大会(HC)期间,华为同样是着重推了自己的 L4 级全栈智能驾驶解决方案,彼时,华为智能驾驶计算平台(MDC)已经分别与一汽红旗、东风汽车、苏州金龙、新石器、山东浩睿智能等多家车企和伙伴达成合作。
经过行业这么长时间的探索,我们都知道,L4 的真正商用遥遥无期,未来很长一段时间, 自动驾驶的增量空间还是属于辅助驾驶 ,作为定位增量供应商的华为,自然也想切入到这个市场,但是,此时的华为还没有专门配套 L2 的整套解决方案。
一个很明显的例子就是域控制器。

今年的北京车展上,华为展示了自己全套的智能化解决方案。其中提到了两个 MDC 平台,一个是针对 L2+,一个是针对 L3-L4,后者在今年第四季度就能 PoC(Proof of Concept,概念验证),明年 Q2 就真正可用。专门面向 L2+的域控制器时间节点则要更晚,2021 年 Q4 才能 PoC,真正可用得到 2022 年 Q1。
所以,在现阶段想要实现智能驾驶的商业化落地,ADS 从「L4」降维到 L2 是最快方式。
实例就是华为和 ARCFOX 的合作,明年他们合作的首款车就要下线了。北汽新能源副总经理、ARCFOX 总裁于立国透露,新车搭载 3 颗 96 线的激光雷达,6 颗毫米波雷达,12 个摄像头,13 个超声波雷达,算力达到 352TOPS。
不说实际效果,光从账面数据来看,即便你说这套传感器是用来搞 L4 自动驾驶的,我都信。
但是,就像我刚刚说的那样,这套「L4」降维作 L2 用,本质逻辑和 Mobileye 一样。
别看广告,看疗效
目前我们看到的是,Mobileye 通过 Mobileye SuperVision™绑定了国内大厂吉利,而华为则拿下了 ARCFOX,与长安、宁德时代联合打造的新品牌大概率也会上这套 ADS 解决方案。
不过,最终我们还是要看疗效。不管是上面提到的 Mobileye 亦或者是华为,他们的方案落地都在明年的下半年,体验如何还真不好说。
虽然说,「L4」降维 L2 来用,是这些供应商们讲故事的新方式,但是,有主机厂愿意买单,这就是王道。