
在自动驾驶领域中,加州车辆管理局(DMV)的自动驾驶报告一直被看作是各家自动驾驶能力的指引或者一份参考指南。就在昨天,2019 年自动驾驶年度报告新鲜出炉了,共计 36 家公司提交了报告,总的测试里程达到 288 万英里。
先来看一个总览:
- 百度力压 Waymo,排名第一
- Waymo 路测里程数占据半壁江山
- Cruise 实力提升明显
- 中国/华人无人驾驶公司占据榜单半数以上
- 特斯拉垫底
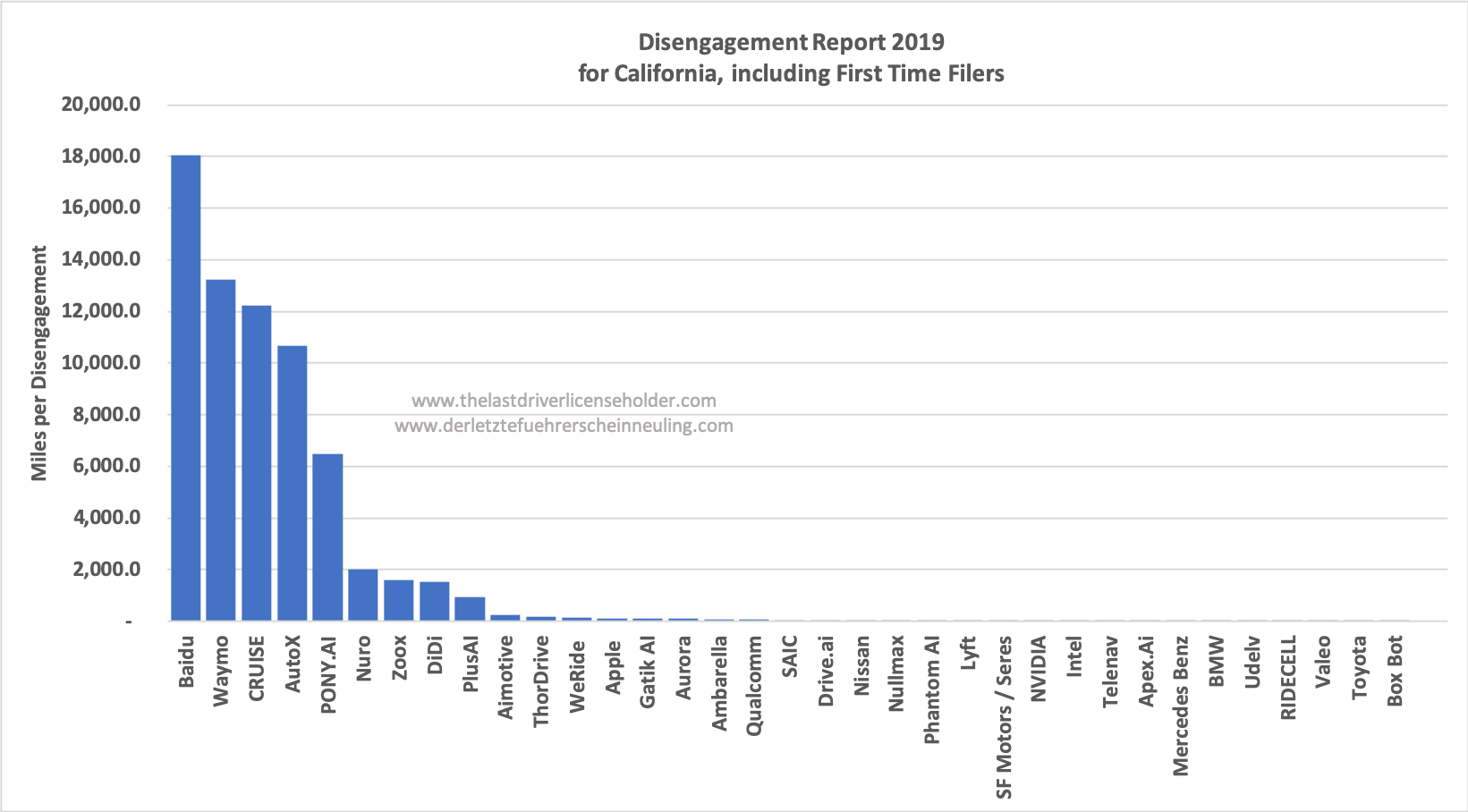
这个图表里的衡量指标,也就是纵坐标,叫做 Miles per Disengagement(后简称 MPD),翻译成中文,就是每英里脱离率,即无人车每行驶多少英里就会被接管一次,这是衡量一家公司自动驾驶实力的一个指标。
百度力压 Waymo

根据这份报告显示,百度无人车每行驶 18050 英里需要接管一次,对比之下,Waymo 无人车每行驶 13219 英里需要接管一次,从这个数据上来看,差异还是挺大的。
不过,有一点需要说明的是,百度的路测里程只有 10.8 万英里,Waymo 实际路测里程达到 145 万英里,至于如何评断,大家心里应该有自己的标尺。
Waymo 路测里程数占据半壁江山
Waymo 去年在加州路测里程为 145 万英里,超过公司在 2018 年的 120 万英里,占据所有路测总里程的半壁江山,但是 Waymo 在其数据平台的仿真模拟路测数据已经超过百亿英里,这方面的增量还是很大。显然,对于 Waymo 来说,虽然路测里程增量有限,但是可以通过仿真来补齐短板。

而且,今年 Waymo 的脱离率也有所降低。之前每行驶 11017 英里接管一次,现在每 13219 英里才会接管一次。这一改进得益于 Waymo 算法能力的提升,降低感知识别中的误报率以及所需的算力,同时缩短了识别时间。
通用 Cruise 实力提升明显
通用 Cruise2019 年路测里程为 831040 英里,是去年的 1.86 倍(去年数据为 447621 英里)。脱手接触率也有很大程度的提升,2019 年上半年行驶 328285 英里,脱手接触 43 次(每 7635 英里接管一次);下半年行驶 502755 英里,脱手接触 25 次(每 20110 英里接管一次)。2019 年总脱手接触 68 次,每 12221 英里接管一次,相较去年每 5202 英里接管一次进步明显。
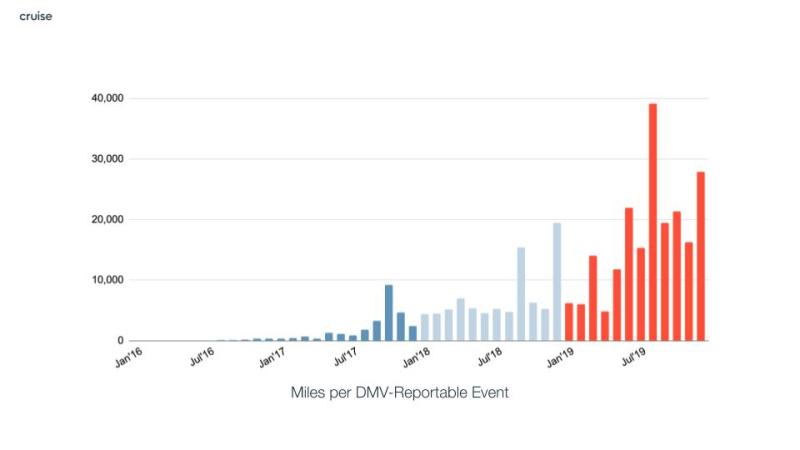
目前 Cruise 团队人数已经从 800 人扩充至 1600 人;每周 2 次「大脑」升级,每四天发布一次自动驾驶 AI 系统升级;自动驾驶车队每天通过 25000 个交叉路口平均每天在旧金山进行 1400 次无保护左转;在过去的一年,已经花掉了 10 亿美元。
从目前这份报告上的数据来看,Cruise 的付出没有白费,同时也从侧面反映了一点: 自动驾驶是真的烧钱。
中国/华人无人驾驶公司占据榜单半数以上
过去的这两年,中国/华人无人驾驶公司发展迅猛,在榜单中的实力和排名也是稳步提升。

在过去的一年,Pony.ai(小马智行)路测里程为 17.48 万英里,每 6476 英里接管一次,相较去年排名未发生变化,但是脱离率较之前降低了不少,进步明显,就在前两天,小马智行宣布获得丰田 4 亿美元投资,显然小马智行的技术实力被认可了。
由华人朱家俊创办的自动驾驶公司 Nuro 虽然排名略下滑,但是脱离率同样下降。就在这个月,Nuro 无人配送车获得豁免权,可以部署没有后视镜和方向盘的无人送货车,两年部署数量不超 5000 台,这件事对于整个自动驾驶行业来说,也是一件很有意义的事情。

同为初创公司的 AutoX 来到第四,去年第九,提升明显;国内一家专注于重卡自动驾驶的初创公司 PlusAI 智加科技进入前十,排名第九;文远知行 Weride 排名第十一。
值得一说的是,滴滴这次也是首次出现在这份报告中,刚上来就冲到了第八的位置。

因为内讧被强制清盘的 Roadstar 因为没有提交报告将被取消加州路测资格,同样被取消资格的还有小鹏汽车,原因也是因为没有提交报告。
特斯拉垫底
今年的垫底冠军是特斯拉。特斯拉的成绩,实在是有点没法说,大家自己看吧: 去年特斯拉在加州自动驾驶路测里程为 12.2 英里,接管次数 0(你品,你细品)。而且,去年和前年特斯拉都没有提交报告。
显然,特斯拉觉得这个报告意义不大,然后又不想被吊销路测牌照,稍微跑了跑,有个数据可以交差就行。

但是,有一点你必须承认,特斯拉一定是自动驾驶行业中无法忽视的扫地僧,毕竟马斯克表示要在今年实现百万 Robotaxi 的上路,值得期待。
再补充一句,苹果这次摘掉了倒数第一的帽子,来到第 13 名。看来,收购 Drive.ai 之后,苹果也要慢慢开始发力了。
It’s time to do something
以上就是这份报告的全部内容。但是似乎,大家对于报告反映的内容并不买账,觉得太不靠谱,水分太大了。
Aurora 对这个报告以及测试指标表示怀疑。创始人、自动驾驶大神 Chris Urmson 说:「如果我们在没有任何行人、车辆,路况很简单的地方行驶 1 亿英里,那脱离率其实和在匹兹堡那种路况复杂的城市行驶 100 英里没什么区别。」
Cruise 联合创始人兼 CTO Kyle Vogt 表达了类似的观点:「请记住,在标志清晰的高速公路或宽阔的郊区道路上行驶与在混乱的城市环境中行驶是不一样的。」
总部位于旧金山的自动驾驶卡车初创公司 Embark 则表示在公司内部不会再以脱离率作为评判标准,而是以一种新的指标体系作为评判标准,并决定不发布 2019 年的路测报告。
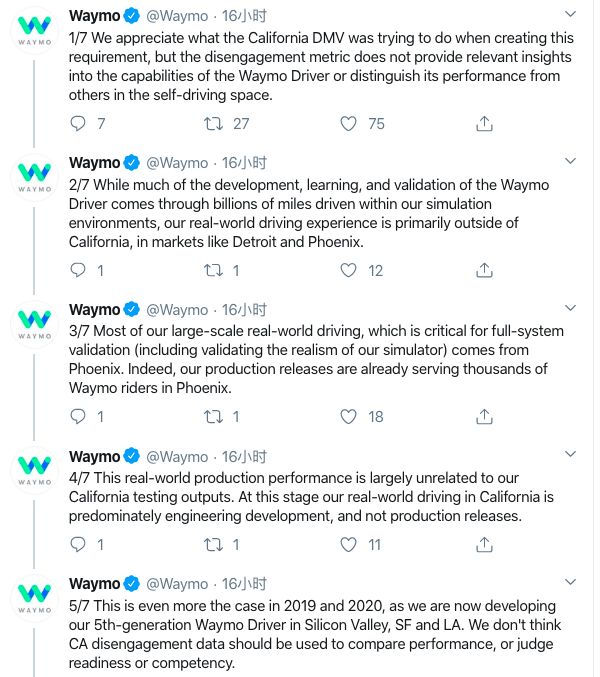
Waymo 更是连发七条 Twitter,以示不满:「脱离率并不能反映 Waymo 的真实实力,Waymo 路测经验主要来自于加州之外的底特律和凤凰城,这些经验为数十亿英里模拟仿真得到的算法进行全系统验证,这种方式与 Waymo 在加州所做工作无关,Waymo 在加州的实际工作是工程开发,我们认为以脱离率作为性能评断标准并不合理。」
其实,对于报告的专业性和准确度的质疑并不是现在才有的,因为 DMV 的报告确实做的不够严谨。首先,大家测试环境不尽相同,比如 Waymo 和 Cruise,前者路测主战场在加州之外的底特律和凤凰城,而后者主战场在路况复杂的旧金山,这两个地方的环境变量并不一样;其次,关于「脱离率」并没有一个统一的标准,怎样的接管才是真正应该被计入的有效接管,怎样算是无效接管,就像 Urmson 说的那样:「 如果没有明确的定义,那么这些数字又意味着什么?」;而且,关于脱离率以及路测的评估都是由这些公司自行评断,也就是说, 参与的公司既是参赛者也是自己的吹哨人 ,所以这就会导致提交的报告可能会掺水分,不能起到很好的指引作用…… 如此如此,这般这般。因为这些制度上的不完善以及监管上的漏洞,现在终于招来了大家的不满。
看来,是时候制定新的自动驾驶性能评判标准了。