
随着今年 L2 自动驾驶方案的普及,主机厂和供应商开始把很大一部分精力转移向 L3 及以上的自动驾驶研发。
今年 CES Asia,德赛西威就联合四维图新,宣布将为主机厂提供量产 L3/L4 级别自动驾驶解决方案。
具体说说双方分工:德赛西威作为国内领先的零部件供应商,在自动驾驶中的感知、决策、定位、控制方面都有了自己的产品规划。
在今年的展台上,他们就展出了最新的 IPU03 智能驾驶域控制器,是一款可量产车规级 DCU,满足 ISO26262 功能安全 ASIL D 等级,主要应用于 L3 级别自动驾驶方案。

IPU 03 的算力达到了 30TOPS,可实时处理来自车辆雷达、摄像头等传感器获取的数据,运行感知,定位,规划和控制等算法。
在去年,小鹏汽车就已经和德赛西威签订了合约,将以 IPU 03 作为核心,在 2020 年开始逐步量产 L3 自动级别的驾驶方案。
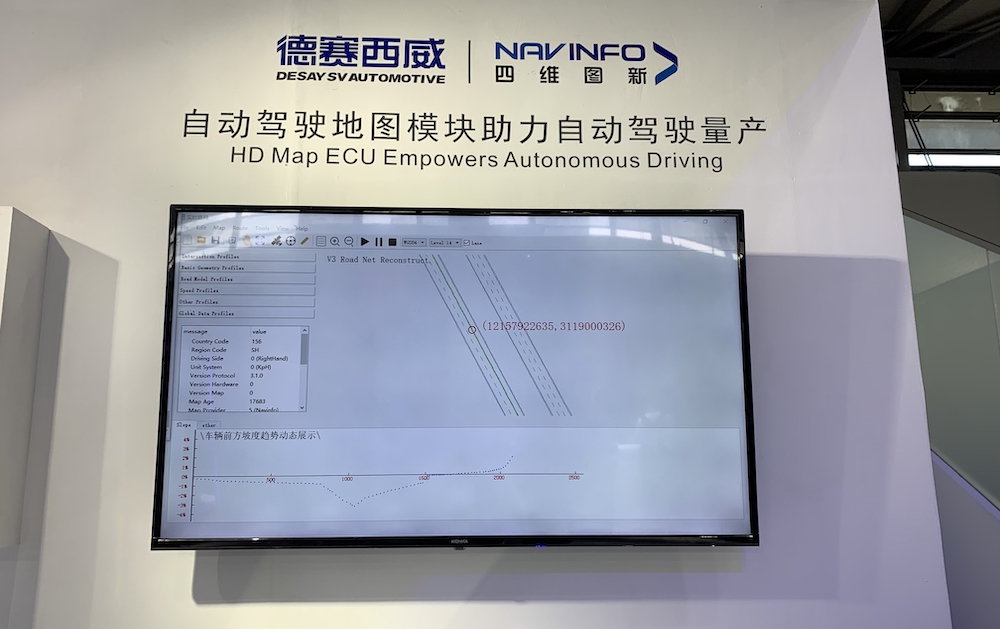
而四维图新作为图商,则会从地图数据层面提供支持。具体包括自动驾驶地图数据、地图引擎、在线分发服务和动态交通信息。为了保障高精度地图的实时更新,双方还会利用车端与四维图新云平台数据协同能力,实现动态、快速更新地图数据,实时收取、处理传感器数据并提供数据增值解决方案。
在数据采集层面,四维图新自动驾驶地图已经建立了一套包含数据采集、自动化制图、地图学习更新体系以及在线分发服务的自动驾驶地图完整产品解决方案。
目前,四维图新高精度地图数据累计已经超过了 30 万公里,覆盖了全国的高速路网以及主要城市的环路等封闭场景。
具体来看,除去本身的采集车之外,四维图新也正在利用「众包」的模式来完成自动驾驶地图的更新和维护。目前,四维图新以及跟车厂联合做了相关技术解决方案了,完整走完了从车的传感器的数据上传以及数据更新的闭环。
前两天,Nullmax 科技在发布 L3 自动驾驶方案的时候,强调了不依赖高精度地图的观点。对于,四维图新则认为高精度地图是一个超视距的传感器,能够增加自动驾驶应用的场景,最终会体现在提高了用户的使用体验。另外,在自动驾驶场景中,更多的传感器代表着更高的安全冗余,这对自动驾驶的量产非常重要,机器驾驶的体系一定会比人工驾驶的安全体系要高。
目前,L3 级别自动驾驶会是「高精度地图+视觉+毫米波雷达」的结构,配合域控制器,就能控制成本,以合理的价格实现量产。
德赛西威研究院智能驾驶研发部部门经理罗作煌告诉 GeekCar,目前德赛西威的硬件已经具备了完整了 L3 的能力,接下来会重点解决跟合作伙伴落地的工作。至于 L4 级别的自动驾驶,相对还比较遥远,但是已经有团队在新加坡进行相关研发。而在技术方案上,德赛西威更倾向于先以 L2 功能的方式量产,后续通过软件算法的 OTA 逐步释放系统的能力最终实现 L3 级别自动驾驶。
另外,除了自动驾驶之外,双方还会在智能网联领域展开合作。四维图新旗下的四维智联,将向德赛西威提供面向智能驾驶的整合车联网内容产品与运营服务战略。
